I made a thing! I needed a way to mount the head unit and microphone for my ICOM IC-5100 radio in my truck. I’m not into making holes in the vehicle, so I chose to use a cup-holder mount. I had one handy, but didn’t have the mounting for this particular head unit. I knew I could 3D print one, but I didn’t find one I liked. So, I made my own.
https://www.thingiverse.com/thing:7066551
Now it’s available for anyone to download, and I have something to use in the truck!
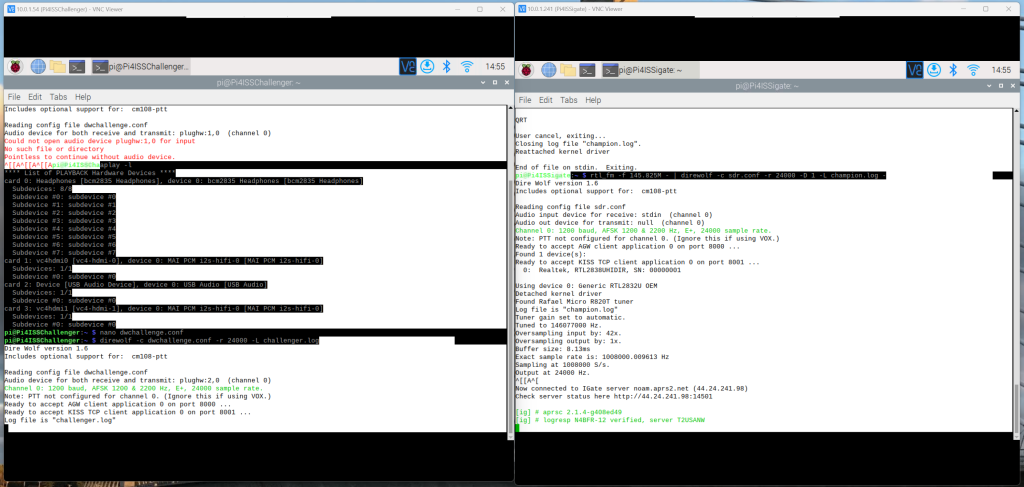
What’s a better receiver for an APRS receiver for packets from the ISS? Let’s do a side by side test.
Left is the challenger Baofeng, Right is the RTL-SDR Champion
For several months now, I have been running signals from a discone antenna on my roof into a RTL/SDR receiver connected to a Raspberry Pi. On a good day, I pick up a few packets from the ARISS digipeater running on the ISS at 145.825 MHz.
I was wondering if I could hear more packets with a different receiver so I decided to create a side/-by-side A/B test. Here’s the configuration:
Discone Antenna fed into my “Tech Center” / Ham Shack Split antenna with a coax “T” – one goes to champion setup, one to challenger. Using equal length coax with SMA connectors.
Both are tuned as best I can for audio quality using data on 144.390, and then switched to the ISS frequency.
The experiment was configured on Wednesday, December 21 in anticipation of a predicted 83 Degree Elevation pass on 22-Dec-22 at 17:26 UTC. I’ll update this blog as I get pass data in.
Update: 23-Dec-22 at 0955 UTC – A moderate height ISS pass (32 deg El) coming through this morning at 1007 UTC. Couldn’t gather data Wednesday because the ISS radios were off for the space walk.
Update: 23-Dec-22 at 1023 UTC – ISS radios were still off during the pass. Trying again later today (Friday).
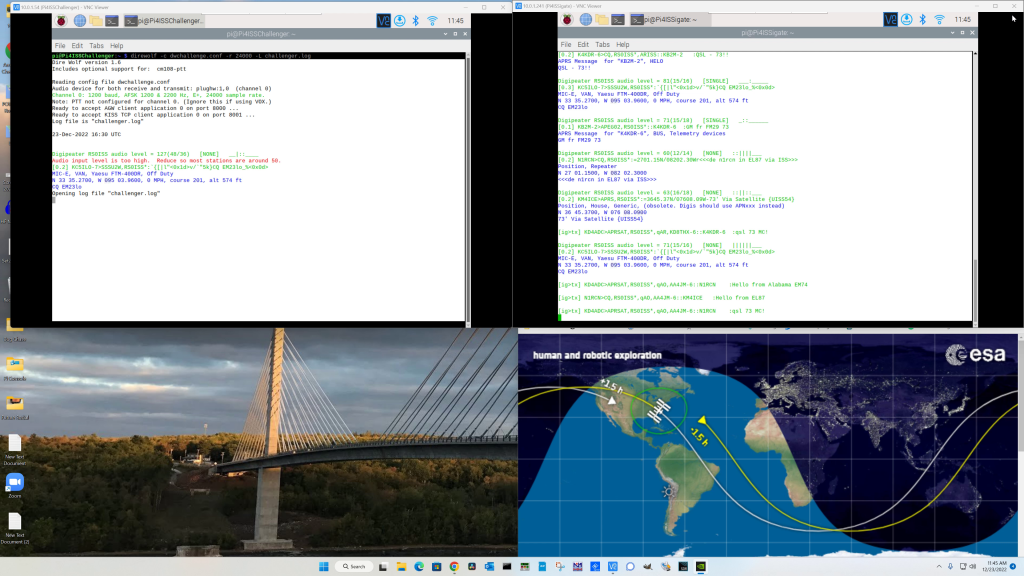
Challenger radio on left, champion SDR on the right.
Update: 23-Dec-22 at 17:00 UTC – Good pass with many packets caught. There was an obvious winner in the SDR. You can see on the screen show it captured many packets while the Baofeng only reported 1 for the entire pass. Going to change HT’s and try again on a later pass.
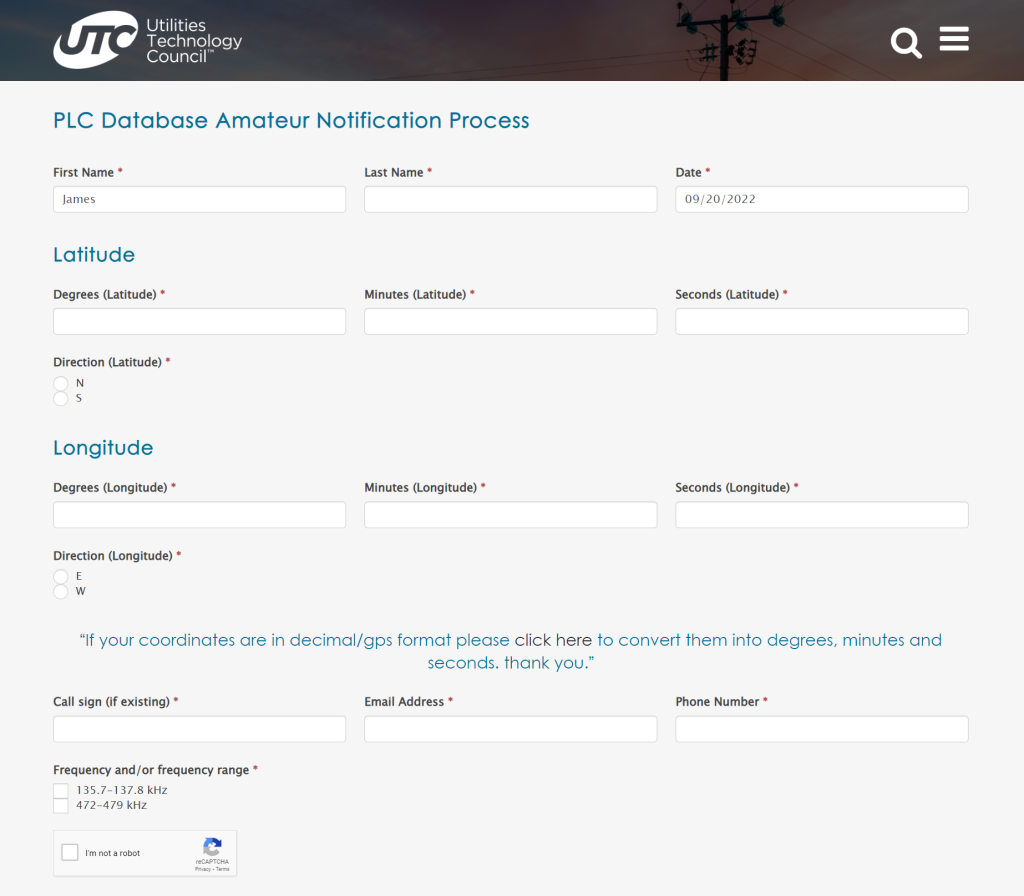
While I haven’t played with these long wave bands yet, it would be nice to understand if I have any restrictions to that operation. Since the FCC requires me to notify the Utilities Technology Council 30 days before I start operation, I decided to do that.
The link wasn’t jumping out at me from the main utc.org page, but some Google-fu lead me here: https://utc.org/plc-database-amateur-notification-process/
Of course they want lat/long in Minutes and Seconds and all my GPS Pi’s deal in decimal coordinates, so I found this handy conversion tool on the FCC web site: https://www.fcc.gov/media/radio/dms-decimal. It was only AFTER I found the FCC link that I noticed they linked to the same page. Usability opportunity to move that above the entry window or, heaven forbid, convert it themselves!
So, I dutifully entered the data right down to the 100th of a second because I am that kind of nerd and was informed I needed to round that to whole numbers. If they don’t mind a margin of error of 100 feet +/- in latitude, why not.
So my “notification” has been successfully submitted. Stay tuned for what happens next.
As always, provide feedback via my twitter @N4BFR.
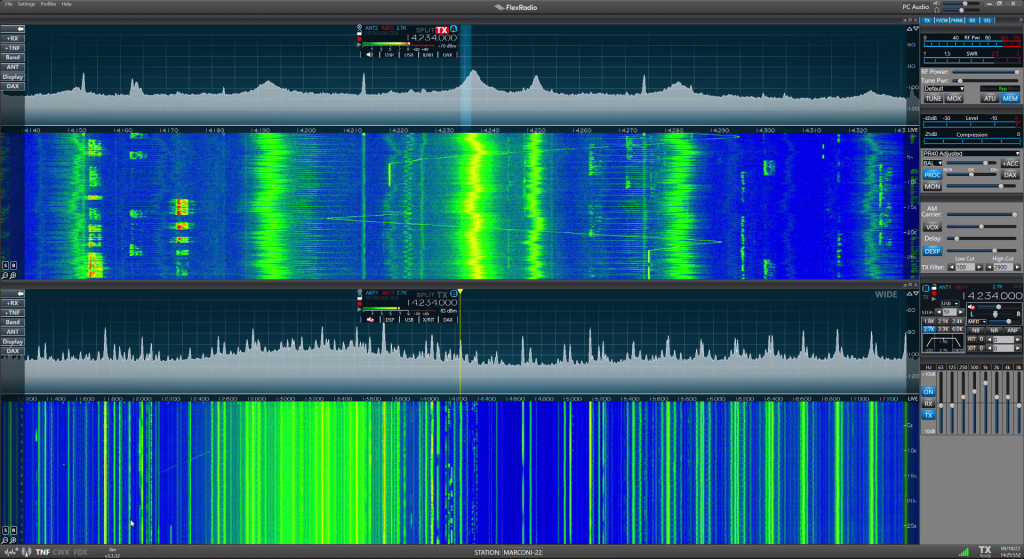
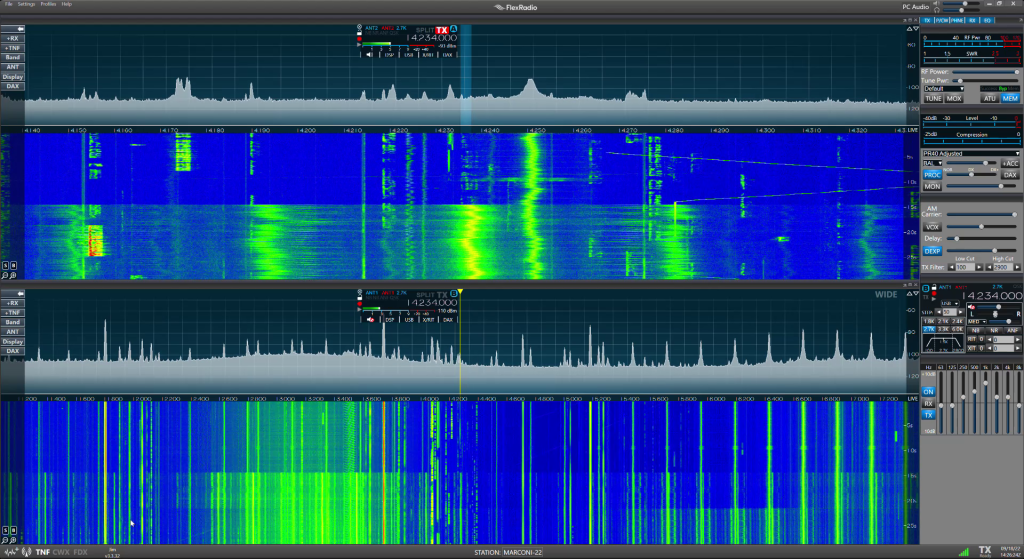
For quite a while now I have been putting up with heavy RFI on 20 Meters in my shack and I have been really thinking it’s a neighborhood problem more than an in-home one. It looked like this on my waterfall:
Flex Smart SDR 20 Meter Band View
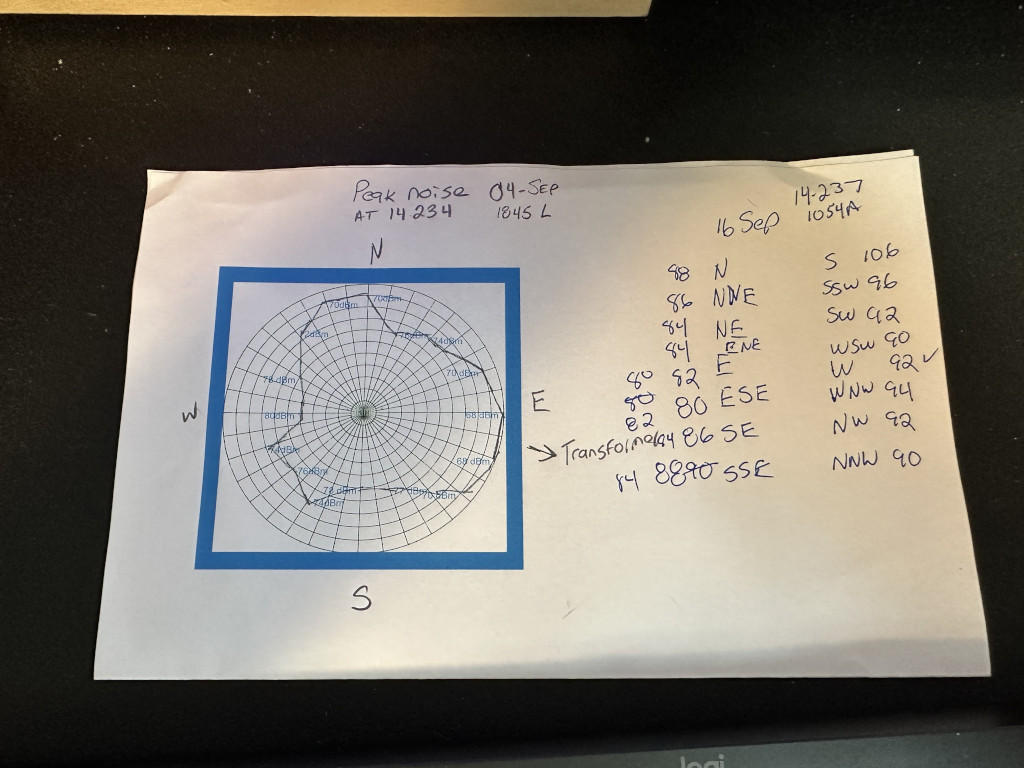
I was getting ready to call the power company and ask them to come fix the transformer outside my house. I based this on the fact that as I turned the antenna in a different direction, the closer I got to pointing at the transformer, the stronger the RFI became. Here is my chart.
Home made polar coordinate chart showing peak signal strength, along with a second measurement
So, step 1 was to identify the problem and a likely suspect. After reading a bunch of articles on RFI chasing, I wanted to 100% eliminate the chance that it could be something in the house, because if you look at the path between the Antenna and the Transformer, it goes over the house.
Antenna to Transformer
On to step 2 then, eliminate the house. So on Friday I set up one of my radios on battery, tuned to the peak of the signal and one by one turned off every breaker in the house and wouldn’t you know it went away!
So, one by one, I powered the breakers back up, starting with areas where I have a lot of electronics, including my shack, which is in that line. I needed to leave 30 seconds between each power up so all the devices would get to normal “radiating” state. The shack was clear, but when I got to the Living Room – there it was.
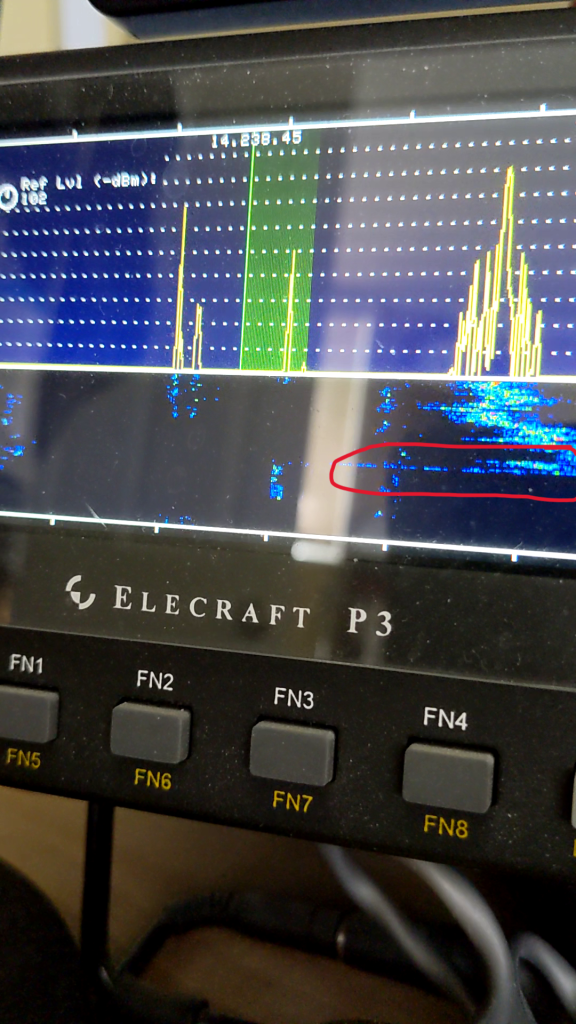
Step 3 was figure out what the offending device was. I had experience in the past with an ethernet switch causing interference. So I disconnected that and powered up the rest of the media center. All quiet. Here’s what happened to the waterfall when the switch was plugged in.
Waterfall showing RFI appearance when ethernet switch was powered on.
Gotcha! Because that switch was in heavy use, I wasn’t able to replace it immediately, but today was the day. I bought a smaller switch that was powered over POE instead of a brick and here’s what the waterfall looked like when that old switch was disconnected for the last time.
Waterfall of 20 Meters (top) when ethernet switch was disconnected for the final time.
So, a couple of lessons for me: 1) Troubleshooting using the directional antenna was a time saver because I knew where to focus my energy. 2) Don’t assume it’s outside the house when there are other potential issues in the path. 3) The scientific method of change one thing only and then go on REALLY shined in this test.
This didn’t solve it all. There is more noise to be chased, but the largest offender is no more, and that opens up a great deal more of 20 meters for me, which makes me happy.
Comments about this post? Leave them for me on Twitter @N4BFR.
Originally published 27-August-22 at 5:00 PM ET Updated 28-August-22 at 12:25 PM ET
Apollo 16 Command Module “Casper” at Space and Rocket Center in Huntsville, AL – Picture by N4BFR
Back in the days of Apollo, hams were listening in to Apollo 11 and other space flights. An article entitled “Lunar Eavesdropping” from the ARRL talks about how a couple of hams listened in on Apollo 11, and outside of getting a 10 second head start on the rest of the world, made it work but didn’t hear anything unique.
Over the last few months I’ve watched as Curious Marc on YouTube, known as AJ6JV in Ham Radio circles, has completely reconstructed signals from the Apollo gear in his basement. It’s been fascinating to understand the “RF Black Arts” as he says, of the really complex ways the capsules and LEM sent back their signals in a multiplexed method of FM and PM data. One thing I noted that this frequency range was around 2.287 GHz, in the “S-Band” frequency range.
NASA has had 50 years to be more sophisticated with it’s communications. It now breaks down comms into their “Near Space Network” which handles the communications around the globe, and the “Deep Space Network” which handles communications beyond earth orbit.
I’ve spend the last few hours going through documents on the NSN from as far back as 2000 and from what I can tell, they still primarily use S-Band frequencies. Here’s an example of frequencies listed in a doc related to Wallops Island, VA – part of the NSN.
So, there may be something there to trying to pick up some Artemis 1 or NSN signals while it’s in near Earth orbit on Monday. I do have some omni-directional 2 GHz receive coverage with an SDR. My mission would be to capture anything unique and record it for later analysis, though I expect it to be encrypted, since SpaceX encrypted their telemetry feeds after hams started to listen in.
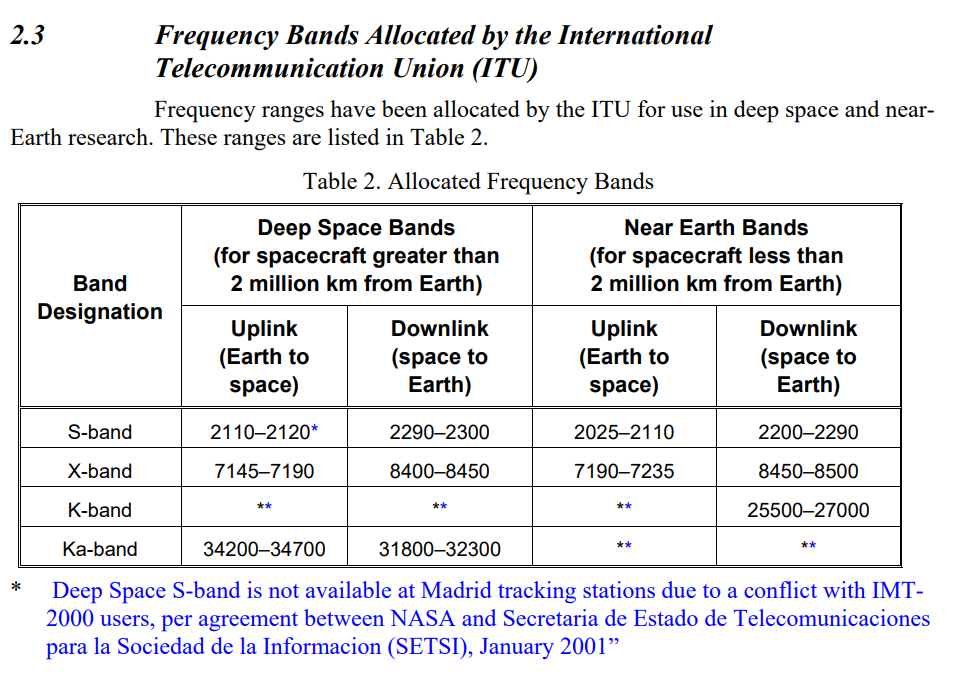
About 2.5 hours after launch, Artemis 1 will start toward the moon and switch to the DSN according to NASA PR data. (Update: On the 8/27 media conference they mentioned this was right after the TLI event and could be 90 minutes in to the mission) DSN also has S-Band communications but needs to use X-Band or higher at least part of the time according to this JPL document:
X-Band, K and Ka-Bands are out of my range at the moment, but I will be checking in on the S-Band segment from time to time. If I was communicating, I probably wouldn’t be turning radios on and off, but instead looking at simulcasting the streams.
So, lots of fun to be had this week as I begin a look to peek at space comms! If you have something to add or share, hit me up on Twitter @N4BFR or on Facebook.
For a long time I have used two mics for my amateur radio setup, a Heil PR-40 for my HF rig and A Heil PR781 for my ID-5100. I received good audio feedback all around and every time I tried to get down to 1 I’d get noise in one or the other rig and I’d just go back to what worked.
Recently I’ve been doing some writing work and that’s required me to have conference calls a couple of times a week. The mic on the camera is decent, but I have these beautiful professional mics right next to me, and it was killing me not to use them.
I ended up purchasing a new tool to help me integrate. The Focusrite Scarlet 2i2.
Now, instead of the PR-40 going straight into the balanced input of the Flex 6500, it runs into the 2i2. The 2i2 has 2 line level outputs on the back. I run that to the Flex 6500 and it doesn’t know the difference. With the Focusrite’s USB connection to the PC, it sees it as a sound card that I can run into Zoom or Google Meet. No sweat.
This still leaves the problem of feeding the ID-5100. I’ve done this for now.
[Image Removed – It was a hot mess.]
I received feedback from the folks on the Atlanta Radio Club Sunday Night Net that the XLR Split leaves my FM audio with a high pitched whine in it. So, as the graphic says, I’m going to build an adapter to come out of the other Scarlett 2i2 line out port and step the audio down to Mic level for the 5100.
Parts are on order. I’ll update later this week on how things go.
17-Feb-21: It’s Later. Here’s what happened.
The device I made didn’t work as planned. I also purchased a commercial device and tried it on the line to the ICOM 5100. It didn’t like that either. So I purchased a mic filter that seems to mitigate some of my audio issues and here’s what the chain looks like.
If you have any thoughts on this, hit me up on Twitter @N4BFR.
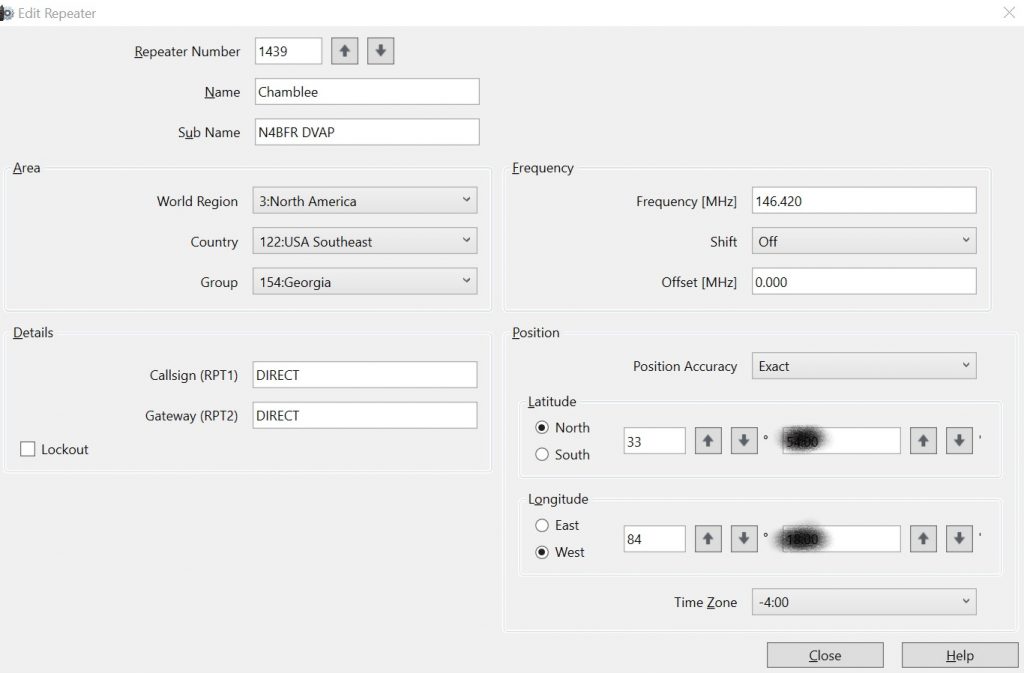
I wanted to see if I could add my DVAP Dongle hotspot to the DR list of repeaters on my Kenwood TH-D74A handheld. I could find the settings for an ICOM radio but not a Kenwood so I did a little experimenting. Here’s what worked for me:
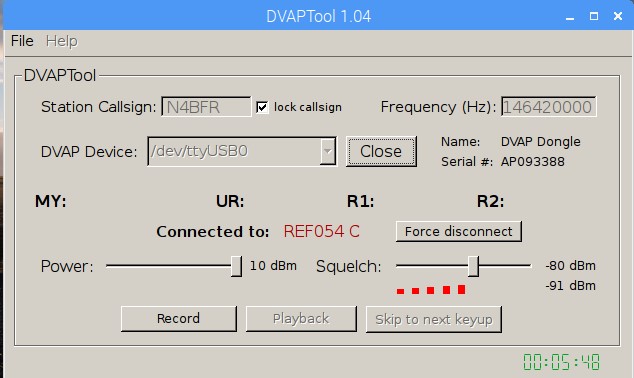
Part of the trick was using the DIRECT tag in RPT1 and RPT2. This allows me to link and unlink repeaters using the DR mode, tested on 30C and it came right through. This works with DVAP Tool V1.04 that I am running on my Raspberry Pi.
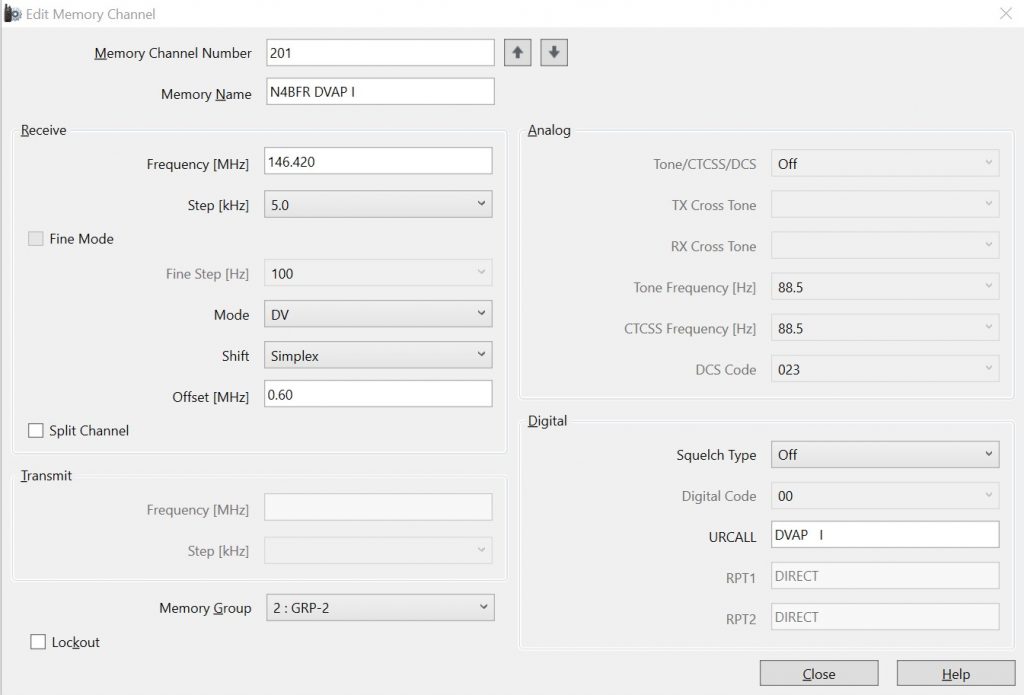
The only functionality that doesn’t seem to work is INFO and ECHO since the DVAP is looking for “DVAP I” vs. just the “I” command and “DVAP E” versus “E”. To keep that functionality, I put it in as a repeater memory.
Now I have DVAP access both ways, memory channel or DR mode. Hope this helps someone figure it out.
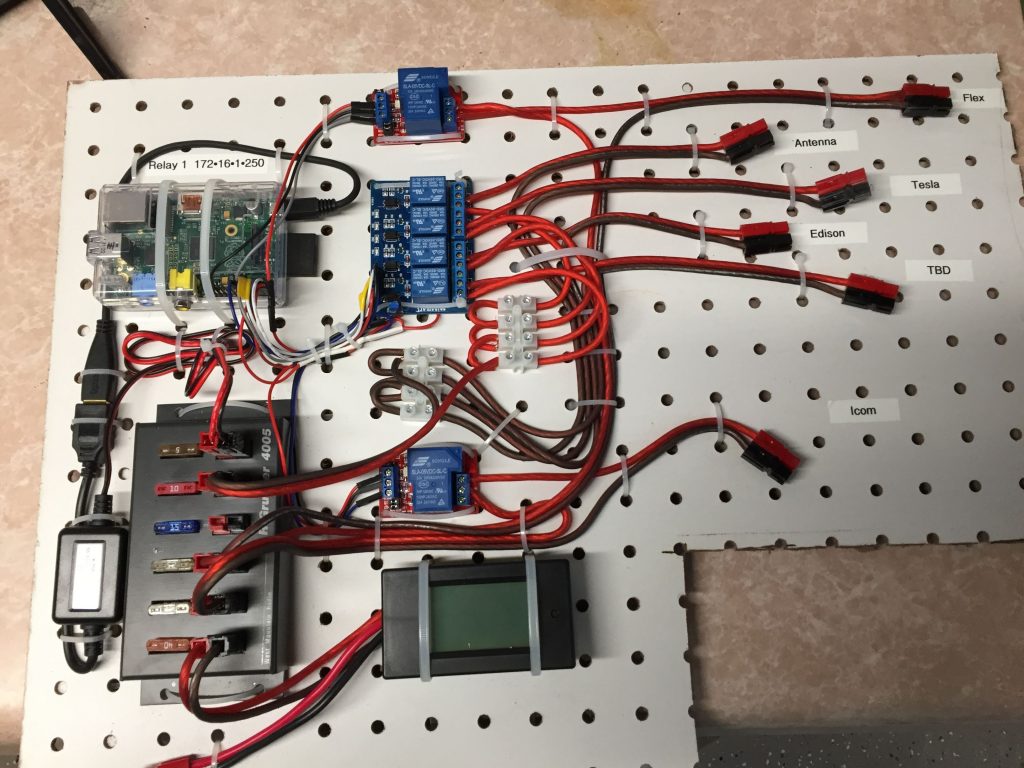
As one of my earlier projects, I set up a Raspberry Pi with some relays to control my systems remotely. This allows me to warm things up from the couch before I head to the shack, or if COVID ever goes away, to fire up the radio remotely.
2016 photo of the relay panel.
So it’s been several years since I made any updates to the Raspberry Pi that makes all that work. I remember rolling back from a Raspbian update because it broke some functionality and I wasn’t in a place to spend time on it. I finally found the time this week, 3 YEARS later.
As I write this it is January 15, 2021
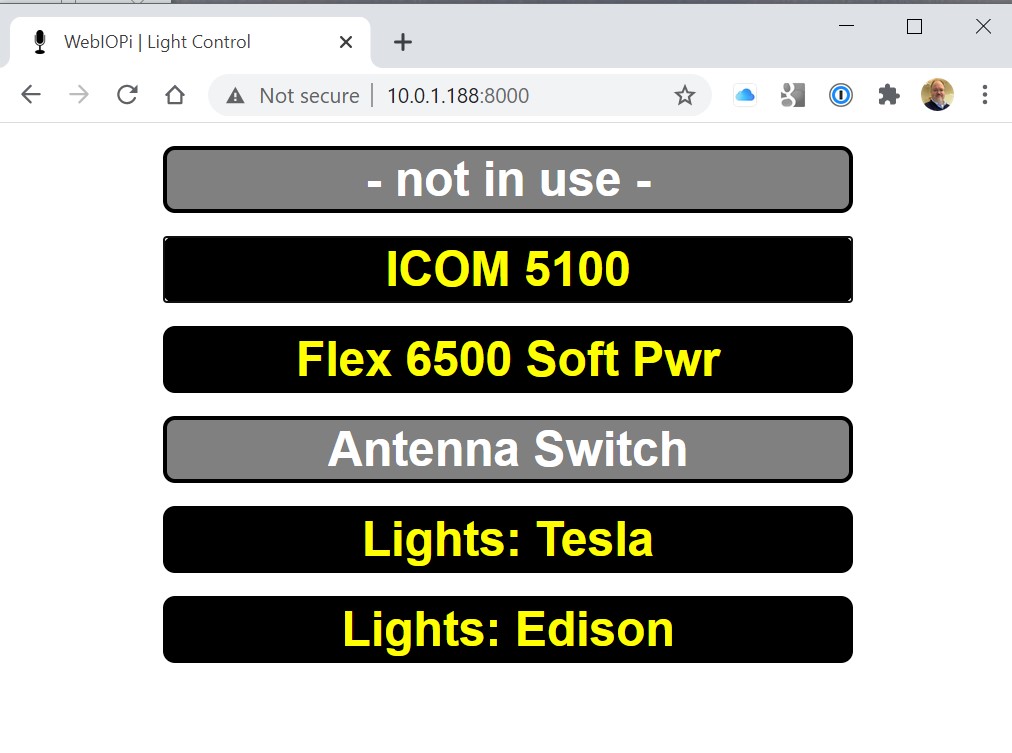
So I decided to start from the ground up with the latest version of Raspbian and reinstall WebIOPi, which is the software I am using. WebIOPi allows me to use the GPIO pins to control the relays using a web interface. I had spent a little time customizing it for my shack so I wanted to keep using it. Unfortunately it hasn’t been updated in 4 years.
My quick GUI for controlling lights and radios.
After struggling with the latest version of WebIOPi (0.7) and dealing with “invalid syntax in thread.py” and “Attribute error” issues related to my Pi 2B, I found my savior on GitHub. https://github.com/doublebind/raspi
Follow the instructions theree and you are good to go. I’ll be pleased if it will run another 3 years with no need for updates.
For their next Zoom meeting, the Atlanta Radio Club is having a “show us your shack” session so I thought I would use this time to share mine along with some detail on what’s there. For ease I have numbered many items and linked to more information where I can.
Let’s start from the top left: (1) Photo & Certificate: The photo is the cover of QST Magazine from August 2011 and a copy below of the short article and a photo from the Coca-Cola 125th Special Event Station the Atlanta Radio Club put on. The certificate is my Volunteer Examiner certification, it lets me be part of a testing team for new ham radio licenses issued by the FCC.
(2) Part of my microphone collection, along with a couple of other odds and ends. (2a) is the Heil Sound Classic Microphone which I added the call letters to in this YouTube video. (2b) is the Shure 55SH which inspired my N4BFR Vision logo.
(3) is the brass and wooden Watch Stand I made back in July. Next to it is an old Western Union sounder that would summon someone to your shop to pick up a telegram.
(4a & b) are JBL Control 2P speakers. I’ve had these 2 years now and I really recommend them, they sound great. Not shown, but for PC audio I use the Schiit Modi 3 DAC and I can really tell the difference a better Digital to Audio converter makes.
(5) is my lighted call-sign sign I bought to celebrate 10+ years in Amateur Radio. It’s made by Gifts4Hams.com which does a lot of very nice laser engraving. I have a QSL card chest from them as well. Under the sign is the Heath GC-1000 “Most Accurate Clock” which was part of my 24 Hours of Clocks YouTube experiment. Between that and the speaker is a Ducati desk mic I found at an estate sale.
(6) is more of a memory wall than anything else. The panels are by Wall Control and I liked them so much I ended up redoing my workbench with them as well.
(7) is one of Ham Radio stations I have in the room. When I designed this 8+ years ago this was set up to be a contest shack that we could run Morse and Voice in at the same time and we even worked a third station in for digital. This station is named “Edison”. The radio is an Elecraft K3 with a Panadapter. This station uses a Raspberry Pi 4 4GB for logging, digital modes, and just about anything I need.
(8) is a Tivo Mini, I can repurpose one of the Edison monitors for TV and run the audio through the JBL speakers for watching news and weather.
(9) are antenna controllers. On top is the SteppIR SDA2000 Controller for my SteppIR Urban Beam antenna, and below it is a Yaesu G450A rotor controller that I put an add-on board in for control from my PC.
(10) Are the Wright and Sputnik monitors where I monitor things of interest. Wright is on the top and I think of these two as a dashboard, it shows Local and UTC time, temperature inside and at KPDK, my ADSB receiver so I can track planes in the neighborhood and I manually keep antenna configuration displayed. On the bottom is Sputnik which tracks the International Space Station via a program called GPredict. Since my 70 Amp Astron 12 Volt power supply is not where I can see it, I use a Raspberry Pi Zero W as a Web Cam to see the status dynamically. I also keep a text log of states I need to complete my ARRL Worked All States awards and the web interface for my PiStar hotspot which gives me DMR access. Wright and Sputnik are powered by separate Raspberry Pi 3’s in Kiosk mode.
(11) My handhelds for DStar and DMR. Currently using a Kenwood D74A for DStar and APRS, and a used Motorola XPR6550 for DMR.
(12) starts the big “Tesla” work station where I spend a lot of my time. I have gone through different monitors but I expect these LG 27UD68P 4K HDR monitors to last me a while. Not shown but they are powered by an ASUS ROG Gaming PC I picked up a few years ago.
(13) is my Flex Radio 6500 HF Radio. This is a terrific radio, a big step up over the Elecraft K3 (which is a wonderful radio in it’s own right). 4 tuners, covers DC through 6 meters, plenty of expandability and integration. I also have the (13a) Flex Radio Maestro for listening and operating around the house or the neighborhood via Wifi. I am really glad I got on this system early on. I am thinking of upgrading to a 6700 for even a few more features, but I haven’t pulled the trigger yet.
(14) For VHF / UHF and D-Star I have the ICOM ID-5100 radio, which I liked so much I bought 2. One for the shack and one for the car so I don’t have to learn 2 different radios and I can share programming in-between them with SD Memory cards.
(15) Mixes 6 different audio sources including the radios and PC plus and Alexa and the TV. It’s the Behringer Eurorack Pro and it’s just what I need. I tried a fancier PC controlled mixer for about 6 months and for simplicity of being able to reach up and turn the knobs or mute something quickly, it can’t be beat. By the way, the Flex and Mixer are mounted in 2 wooden stands I custom made. Just below the mixer is a 7-Segment clock I made with a Raspberry Pi (are you getting a theme here?). Under that is an eInk display I use to track when future SpaceX launches are. Yes that is powered by a Pi as well.
I think that wraps it up. I would love to get questions on any of this or have discussions or even give support. Check me out on Social Media at https://www.facebook.com/N4BFRVision or https://twitter.com/N4BFR_vision.
Disclosure: All of the items above were chosen by me and comments are my personal opinion, I received no special discounts or materials. Some of the links above go to Amazon.com. If you purchase through those links I may receive a commission.
I’ve been fairly lax on keeping up with local repeater nets in my area, so I thought what better way to sync up than to build a list. If you have additions connect with me at n4bfr at arrl.net. Thank you to those that have contributed!
Updated 6/08/2025- 7:15 PM
Day
Organizer
Repeater
Start Time (Local)
Sunday
Alford Memorial Radio Club
146.760
7:00 PM
Sunday
Barrow County
145.130
7:00 PM
Sunday
Atlanta Radio Club
146.820 224.340
8:00 PM
Sunday
Dekalb County ARES
145.760
8:00 PM
Sunday
Piedmont ARC
146.655 147.090
8:00 PM
Sunday
SE D-Star Weather Net
145.350 146.960 REF004A
9:00 PM
Monday
Gwinnett ARS “Want/Swap”
147.075
7:30 PM
Monday
Ellijay ARS
145.170
7:30 PM
Monday
West Georgia ARS
146.640
8:00 PM
Monday
North Fulton ARL “Tech Talk”
145.470
8:30 PM
Monday
Cherokee Co ARES
145.430
8:30 PM
Tuesday
Alford Memorial Help net
146.760
7:00 PM
Tuesday
Butts County ARES
147.285
7:30 PM
Tuesday
Fayette County ARC
145.210
9:00 PM
Wednesday
Alford Memorial EmComm Rag Chew
146.760
8:00 PM
Wednesday
Southeastern DMR Net
444.825 TG 3113
8:00 PM
Wednesday
Southeastern Linked Repeater Net
146.820 & 5 other states
9:00 PM
Thursday
Paulding Co. ARES
146.955
7:30 PM
Thursday
Cherokee ARS
443.675 145.270
8:00 PM
Thursday
Carroll Co. ARES
146.640
8:00 PM
Thursday
North Fulton YL Net
145.470
8:00 PM
Thursday
Newton Co
146.925
8:00 PM
Thursday
GA Tech Yellow Jacket Net
145.150
9:00 PM
Saturday
Turnip Truck Net
146.760
Sometime before Midnight (Usually around 10 PM)
Additional Non-Weekly Nets
Alford Memorial Brown Bag Lunch Bunch Daily (Most Weekdays) – 12 Noon – 146.760
Metro Atlanta ARES First Sunday – 4:00 PM – 146.805
Changes: 6/8/25: DeKalb ARES net is now on 146.76.