If you have any updates or additions please email me at N4BFR at arrl.net. (Updated 5/27)
Mission Audio
Florida Space Coast
146.940 MHz FM repeater rebroadcasts NASA Audio and Launch information (Confirmed February 2020) > http://www.titusvillearc.org/
N1KSC plans to relay audio in conjunction with NASA’s Public Affairs office. This will be on 444.925 MHz. > List of Planned Events
Houston
W5RRR carried some audio in the shuttle days, but has not yet published if they would carry the DEMO-2 audio. If they do, it would likely be on 146.640 MHz FM.
Space to Ground
The Monitoring Times article lists these frequencies for Space to Ground communications for the US “On-Orbit Segment”
WG9XHP – Telemetry for sub-orbital first stage and orbital second stage.
2247.5 MHz, 2255.5 MHz, 2232.5 MHz, 2272.5 MHz – 3.5 to 4.167 Mbps Signal
WJ9FXQ – Autonomous Drone Ship
2090.0 MHz – 600 kbps signal One Watt
WI2XUB – “Commanding to Spacecraft”
2106.40625 Mhz – 12 Kbps Signal One Watt. Authorized for Cape Canaveral including Port Canaveral Recovery Dock Ship, Vandenberg AFB; Kodiak AK; Pensacola FL including Pensacola NAS Dock Ship; Inarajan Guam; Boca Chica TX; Daytona Fl Recovery Location Ship; Jacksonville FL Recovery Location; Panama City Recovery Location; Tallahassee Recovery Location; Tampa Recovery Location.
HF Operations
@MilcomMP on Twitter this morning (5/27) that “Cape Radio” on 10780 Khz is active.
Echolink
For Ham Radio operators, Twitter user @KO4AQF says listen to Echolink node 3082 for NASA.
406.2375 MHz Primary Control Channel (P25 II) Based on the Radio Reference list, this appears to cover talk groupsused for SpaceX, Orion, SLS and other operations frequencies.
SpaceX 900 MHz
935-939 MHz (Moto TRBO) Radio Reference only reports an “Operations” talk group.
SpaceX 400 MHz
464.7375 Primary Control Channel for Cape Canaveral (Moto TRBO) Radio Reference lists 2 “Operations” talk groups
45th Space Wing – US Space Force
386.375 MHz Primary Control Channel (P25 I) Radio Reference lists mostly security, fire and base operations talk groups.
Associated Frequencies
(Also see NOTAM / NTM information below)
Air Traffic Control
KXMR – Cape Canaveral AFS Skid Strip 118.625 MHz AM 143.150 MHz AM 239.05 MHz AM
KCOF – Patrick SF Station 133.750 MHz AM Ground 269.375 MHz Ground 132.650 MHz AM – Orlando ATC Departure and Arrival
TTS – Shuttle Landing Facility 128.550 MHz AM Tower 284.000 MHz Tower 134.95 MHz Orlando ATC Departure and Arrival
Aviation Emergency / GUARD frequencies 121.500 MHz AM 243.000 MHz
Coast Guard Emergency
15.6800 MHz FM
Amateur Radio on the ISS
ARISS is ham radio communications to and from the ISS, not mission audio. This is also used when schools “Talk to an astronaut.” More on ARISS > https://www.ariss.org/
145.800 MHz FM Voice & Slow Scan TV Repeater Downlink
145.490 MHz Voice Uplink (Americas, Pacific, S. Asia)
145.200 MHz Voice Uplink (Europe, Russia, Africa)
145.825 MHz Packet Uplink and Downlink
437.550 Mhz Packet Uplink and Downlink
437.800 Mhz Repeater Downlink
145.990 MHz Repeater Uplink (Requires PL of 67 Hz)
Notice to Mariners / Notice to Airmen
Because of risks to aviation and marine traffic, notices are published to avoid the areas of launch and rocket landing. While not specifically radio related they may at times carry frequency information.
USCG District 7 reports in LMN07202020
ATLANTIC OCEAN - FLORIDA - CAPE CANAVERAL: EASTERN RANGE OP# X0053 FALCON 9 CREW DEMO-2
Eastern range will be conducting hazardous operations surface to unlimited within portions of Warning Areas W497A, W497B, W137F/G, W138E,W139E/F, W140, W141, W122 and the following Hazard Areas.
THIS IS A MANNED SPACE LAUNCH
A: From 2838 25.89N 8037 17.06W
TO 2839N 8037W
TO 2901N 8014W
TO 2858N 8011W
TO 2834N 8029W
TO 2833 32.69N 8034 1.72W to beginning
B: From 3122N 7744W
TO 3201N 7716W
TO 3218N 7641W
TO 3212N 7634W
TO 3142N 7652W
TO 3117N 7740W to beginning
Hazard periods for primary launch day and backup launch days;
Primary launch day: 27 / 2022Z thru 27 / 2107Z May 20. Preferred T-0 is 2032Z.
Backup launch day (1): 30 / 1911Z thru 30 / 1956Z May 20. Preferred T-0 is 1921Z.
Backup launch day (2): 31 / 1849Z thru 31 / 1934Z May 20. Preferred T-0 is 1859Z.
Related Frequency Information:
If a vessel equipped with AIS is determined to be entering the launch hazard area, an addressed safety message 14 with the text "REGULATED
AREA 33 CFR 165.775 ACTIVE STAY CLEAR" will be transmitted to the vessel. All provisions of the safety zone remain in effect; no person or vessel may enter, pass through or remain within the safety zone unless authorized by the Captain of the Port. Mariners are required to contact the Coast Guard via VHF FM channel 16 to arrange for this authorization.
Marine Channel 16 is on 156.800 MHz using FM modulation.
The FAA has published Facility ZJX (Jacksonville Center) NOTAM 0/1729 for 5/27/20. It reads in part:
!FDC 0/1729 ZJX PART 1 OF 6 FL..AIRSPACE CAPE CANAVERAL, FL..TEMPORARY FLIGHT RESTRICTIONS.
MAY 27, 2020 LOCAL.
PURSUANT TO 49 USC 40103(B)(3), THE FEDERAL AVIATION ADMINISTRATION (FAA) CLASSIFIES THE AIRSPACE DEFINED IN THIS NOTAM AS 'NATIONAL DEFENSE AIRSPACE'. PILOTS WHO DO NOT ADHERE TO THE FOLLOWING PROCEDURES MAY BE INTERCEPTED, DETAINED AND INTERVIEWED BY LAW ENFORCEMENT/SECURITY PERSONNEL. ANY OF THE FOLLOWING ADDITIONAL ACTIONS MAY ALSO BE TAKEN AGAINST A PILOT WHO DOES NOT COMPLY WITH THE REQUIREMENTS OR ANY SPECIAL INSTRUCTIONS OR PROCEDURES ANNOUNCED IN THIS NOTAM
...
THE FOLLOWING OPERATIONS ARE NOT AUTHORIZED WITHIN THIS TFR: FLIGHT TRAINING, PRACTICE INSTRUMENT APPROACHES, AEROBATIC FLIGHT, GLIDER OPERATIONS, SEAPLANE OPERATIONS, PARACHUTE OPERATIONS, ULTRALIGHT, HANG GLIDING, BALLOON OPERATIONS, AGRICULTURE/CROP DUSTING, ANIMAL POPULATION CONTROL FLIGHT OPERATIONS, BANNER TOWING OPERATIONS, SIGHTSEEING OPERATIONS, MAINTENANCE TEST FLIGHTS, MODEL AIRCRAFT OPERATIONS, MODEL ROCKETRY, UNMANNED AIRCRAFT SYSTEMS (UAS), AND UTILITY AND PIPELINE SURVEY
No specific frequencies are given, but the Aviation “GUARD” frequencies are 121.500 MHz AM for civil aviation and 243.0 for Military.
I decided after 3 years and a few weird errors here and there it was time to refresh the copy of my Windows 10 on my main desktop PC in the ham shack. (I know, I have Linux and Mac here too!) After keeping a list for a few days, here’s what I use most.
Making a list and checking it twice
Google Chrome I like Chrome for browsing and I use many of the other Google features like Sheets, Drive and Photos, so this all stays integrated. Since it keep my logins and history across all my different machines, this is the universal tool for me.
It’s a Ham Shack, So… One of the reasons I chose this particular PC (ASUS ROG GR8 II) is that it was powerful enough to run my Flex 6500 graphically, and let me multitask. Here’s where I start from a ham perspective:
Smart SDR for Windows. I upgraded to the latest version, 3.1.11 which gave me a radio software upgrade as well.
N1MM Logger Plus Well integrated with the Flex, this is my go-to logging software for any contest I do, plus it puts the DX spots on my Flex spectrum to find-em fast.
Ham Radio Deluxe Why two loggers? Well HRD is more than my logger, it’s how I do digital and Logbook of the World (yes, I have TQSL as well.) It’s my non-contest, everyday QSO software.
Audacity I could have put this with other PC items, but mostly what I use it for is recording my radio items like strange Shortwave signals and it’s a great non linear audio editor.
As I go along I will add items like software for programming my ICOM and Kenwood radios, but not until I need them.
Graphics and Video I’ve been enjoying making blogs and YouTube videos since I have been retired. I use at least one of the next 3 daily it seems.
GIMP – The Gnu Image Manipulation Program – Lousy name, great free and open source replacement for Photoshop or other graphical editors. It’s cross platform too, so I can use it on my Mac and Linux machines as well.
Blender – This one was controversial when I posted about it as a video editor. I learned non-linear video editing about 25 years ago, and this felt comfortable to my experience level. Plus if I want to learn more 3D rendering, it’s there. Again it’s free, open source, and multi-platform so I get to learn once and use anywhere.
Streamlabs OBS – When I want to do a YouTube live show, I use Streamlabs OBS. Look at that, free and open source and multi-platform again. There’s a theme here. It’s very easy to use and I was really please that it had saved my scenes across-installs so I could just click and go.
Raspberry Pi I don’t need a lot of software for Pi because most of what I do is related to programming on the devices themselves. But I need something to handle writing images to MicroSD cards and creating backups. Win32DiskImager is my tool. While I primarily use it for the MicroSD, I have written ISO’s to a USB card with it in a pinch. Pick a drive, read or write from it. It is that simple. To clean those cards, the SD card association supplies a formatter.
So that’s it, the first 11 programs (don’t call them apps on a PC, just, no) on my clean desktop. I’m off to make some contacts!
When I originally designed my ham shack / tech center, it had 3 ham radio operating stations to allow for some contest operating. I named them after favorite scientists, Tesla, Edison and Woz. Tesla is my main station, Edison is where I do experiments and have guest ops. Woz was used a few times for contests, but we found my small lot wasn’t really conducive for multi-multi operations.
A couple of the radios recently went out of the shack so the Woz station has been used for burning DVD’s and other odd stuff. As you can see from the top it became a junk spot. So I decided to collect up some of my Metrology equipment into the space.
Woz Refreshed
Here’s the updated version. On the left, you’ll see the “Harrison” display (as in John Harrison, the father of the portable clock) which tracks my GPS clocks. Below it is my HP 5328A which includes a super accurate 10 Mhz crystal oscillator and a 100-1200 Mhz element which allows for VHF/UHF testing as well. I use this to calibrate my HF radio.
Skipping over the scope for a second, there is a small box on the glass shelf with three connectors. This is a GPS disciplined oscillator that also puts out a 10 MHz standard signal.
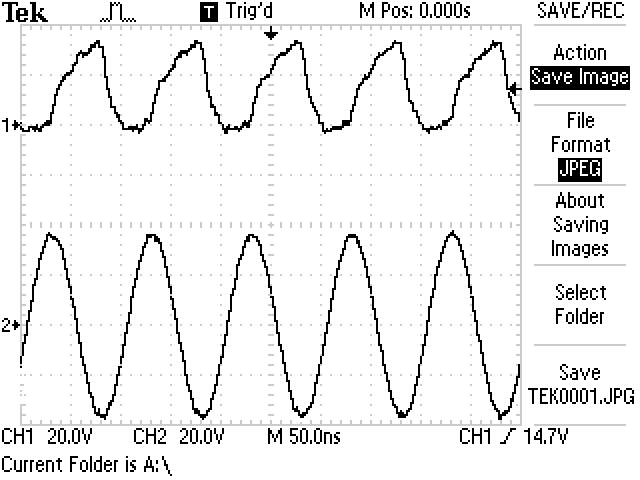
Next over is a Techtronix oscilloscope which allows for a bunch of cool measurements. In this case, I set up both the HP and the GPSDO standards to compare their output.
Screen Capture
Here are the 2 traces. The top shows the output of the HP and the bottom is the output of the GPSDO. Since both are not up to temp yet, I was not worried about how they compare, but I will try again in a few hours.
Use the social links to contact me with thoughts or tips and enjoy!
I have been heavily into the YouTube thing over the last few months, and I have some old and new favorites. Enjoy this week’s nerd-heavy list of things to watch.
SpaceX
Want to watch cool rocket stuff regularly? SpaceX is about to become the first American company to send american Astronauts to the ISS in over 10 years. Plus their launching an internet satellite constellation and working on this little “trip to Mars” thing.
The Modern Rogue
This has a “Mythbusters meets Magic and other Scams” vibe as two “Professional Idiots” do things like making homemade thermite to cook steaks, play with RFID, discuss everyday carry items and even a little ham radio.
The Lockpicking Lawyer
The Lockpicking Lawyer has an artists touch. His videos are super basic, pretty much a camera and a lock, but he gives you a lot of different insights on build quality and how some things are safer than others (avoid TSA locks). Great way to get under the mechanics of how these things work in our daily lives.
Techmoan
I think he’s most well known for his camera reviews, but I really get into all the retro-tech items that he covers. This particular video shows a German 8-track style record player, but he’s covered old computers, hi-fi and phones as well.
TWIT
I feel like Leo Laporte is my older “brother from another mother.” He’s successfully put together a podcast network, TWIT, that covers tech news, photography, internet security, Apple, Android and more every week. I greatly enjoy his Tech Guy radio show podcasts every Saturday and Sunday.
And a plug for me
Part photography, part ham radio and Raspberry Pi tech, part cat videos, Space stuff, just what interests me that day. I’m having fun sharing and making new stuff, so please subscribe just to see what the hell I am going to do next.
I thought I would capture some of the major notes related to Amateur Radio and the Corona Virus in one place for Metro-Atlanta. Amateur Radio Newsline has a international list on their Facebook page.
Ongoing
GA ARES will have nightly nets at 1900 Local, 2300 UTC.
D-Star net on Reflector 30B Monday, Wednesday and Friday
HF Net on 3.971 MHz with 3.923 MHz alternate – Tuesday, Thursday and Saturday
Upcoming
Georgia QSO Party CHANGES
Saturday 4/11 only 1600-0400Z (Noon-Midnight Local)
No Rovers
Multi-Op only for Virtual Radios or Multi-Ham Homes
Weekly Georgia DMR net Wednesdays at 8 PM on TG 3113
2020 SVHFS Conference Postponed (was April in Gainesville)
Two weeks ago I published a blog post detailing the creation of a Raspberry Pi based APRS tracker and Pi-Star hot spot. I’ve made a couple of enhancements since then and I thought I would share an update.
Going with a dedicated 4G connection
I had planned on using my mobile phone as my WiFi connection for getting packets into and out of the unit. During my testing, getting in and out of the car and having the Pi reconnect to the Wifi hotspot was not as seamless as I would like. So I added a 4G connection with a Netgear LB2120 4G Modem.
“Jim, why didn’t you get a Wifi modem?”
– Me to myself.
Why didn’t I? Well, I did want something I could directly connect to, and I though the device I purchased had wifi. But it didn’t so I made the most of it. I knew I wanted something with Ethernet so in the future this could go on my LAN so all is not lost.
Pi as a Wifi Hotspot
Another part of having a 4G connection was to have diversity of networks as I travel. I had a breakdown on the Blue Ridge Parkway last year and my Verizon phone had marginal coverage when I really needed it. I put this on the TMobile network, so I could make a quick Wifi call if I had to in a pinch.
Since the Netgear does not have Wifi, I added Wifi Hotspot functionality to the Raspberry Pi. It’s not what I would use every day for a Wireless Router, but it will work to do some configuration or make a quick call. I bounced around to different instructions as I customized this, so I don’t have one clear place to point to for a “how to” but you can start at RaspberryPi.org.
Which Digital? Why not D-Star and DMR?
I did a lot of programming of my radios to get the ready with the latest D-Star reflectors, and believe me http://www.dstarinfo.com/ is my go-to site. While that is ready to rock, I thought I might want some DMR along as well. Instead of turning them both on at the same time, I configured 2 SD cards. One will boot up with D-Star configured on the Pi-Star, the other with DMR.
I am hopeful that this will make it easy to switch on the fly at the next stop I make without too many hassles.
And a Big Battery
While I was wandering around the half-empty shelves of my local Fry’s Electronics I found a nice deal on a 20K mAh battery. I also dug in to Amazon to find a 5V to 12V upconverter for the Netgear device.
Big battery!
The two devices combined draw less than 1 amp, so I’ve had this running for >12 hours with battery to spare. I intentionally did not mount the battery on the board to make it hot -ish- swap-able if needed.
I don’t expect to polish much more on this before I depart in 10 days but always open to suggestions on changes. Connect with me at the links via the site.
In the next few weeks I have planned a 5,000 mile road trip across the American South and West and I decided that I wanted a tool that would allow me to hop on DStar from wherever I am, since my car has an ICOM ID-5100 already in it. In general, that is easy because there are several DV Dongle and the like out there. In addition, since I will be driving long stretches by myself I thought it would be great for my friends to be able to click a link and check my location. That’s where the APRS Tracker comes in. This blog post documents the custom, single Pi solution I’ve built by merging Pi-Star and Direwolf onto one Raspberry Pi 3B.
Base Hardware and Software
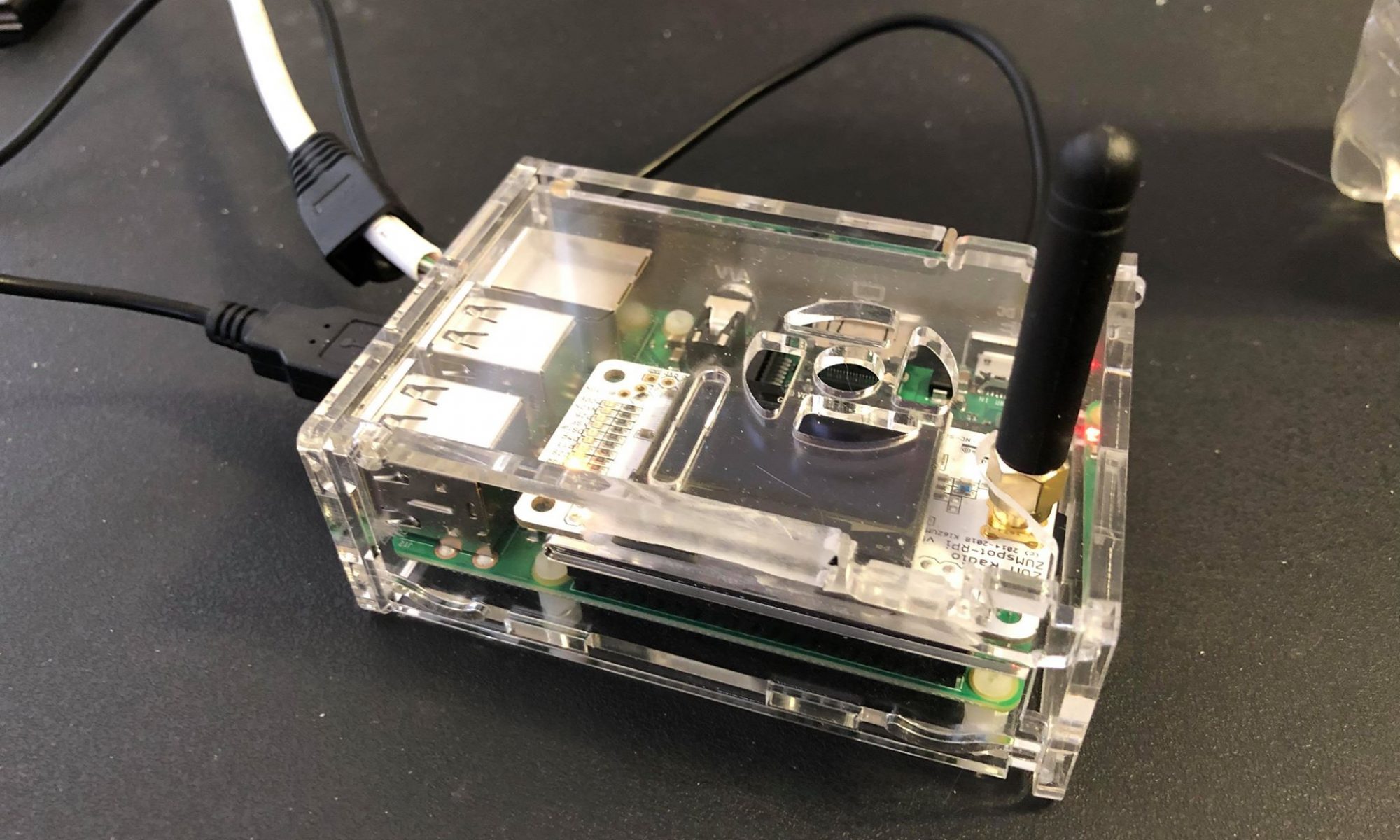
Pi-Star Zum Radio Hotspot I have owned a Zum-Spot for about a year and I am familiar with the configuration so I picked this as the base of my build. It will allow me to do D-STAR and if I wanted to take a DMR radio, it would give me that option too (and a couple of others). So I picked up a new one with a cute little OLED screen and had it running pretty quickly on it’s own. It comes with the Pi-Zero and SD card, making it fairly plug and play. In the US you can get these at Ham Radio Outlet for about $130.
Direwolf Rasperry Pi APRS Tracker with USB GPS Receiver. I’ve been glad to have an IGate at my home running Direwolf for years, so I am very familiar on the general setup and excellent documentation that WB2OSZ puts together. The tracker was new to me though, and it was pretty straight forward to set up with the specific instructions provided.
Running Both on Separate Pi’s
As I mentioned, the ZumSpot / Pi-Star / Pi Zero unit was easy to get online and easy to pair with my phone to make it mobile. Connected to DMR and made several QSO’s in addition to pretty consistent testing on Parrot.
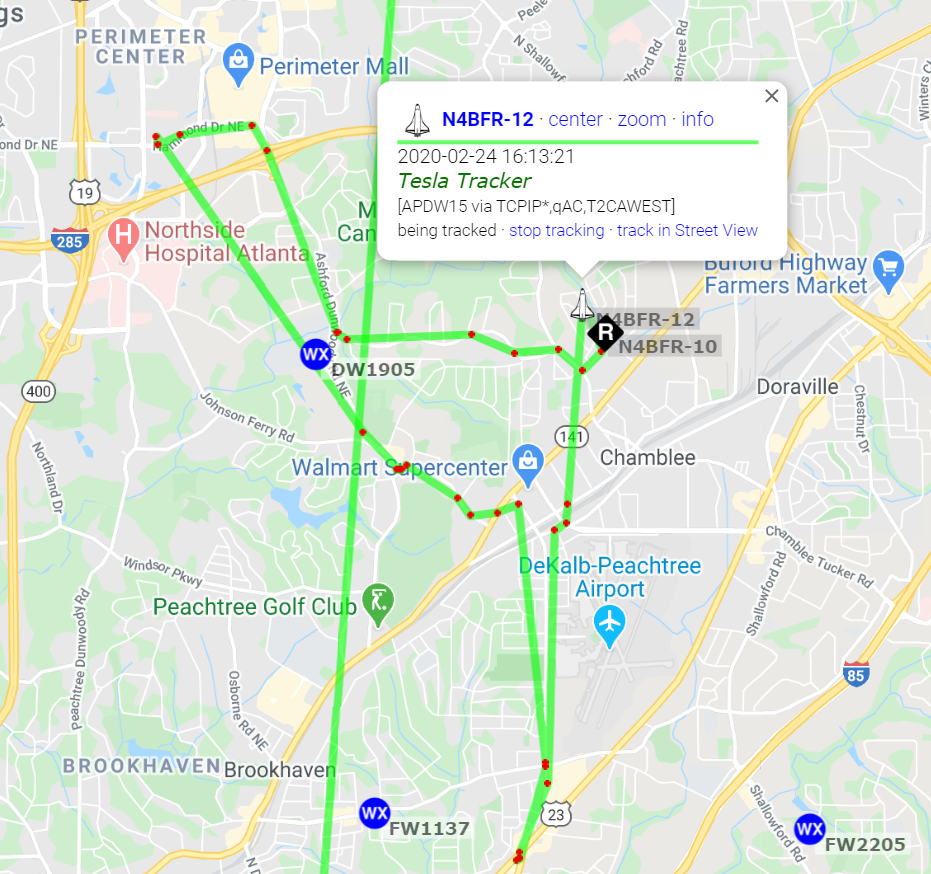
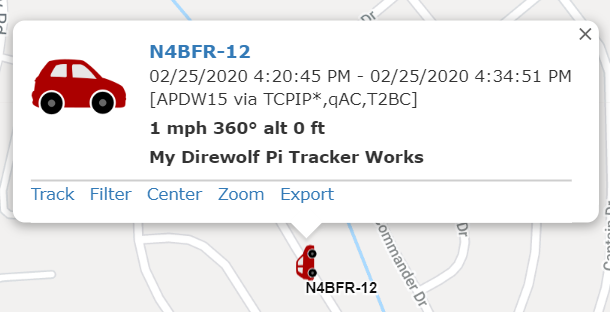
Similarly, I had a Pi Zero W on hand and picked up a $19 GPS puck on Amazon. Ran this in the car for a few days, with the puck just sitting on the passenger seat of the car and it seemed to track me very well. When paired to my phone’s hotspot it simply sent tracking points into the APRS network as I drove around doing errands. The Smart Beaconing feature worked well too. Sample Below.
Level of complexity = clunky.
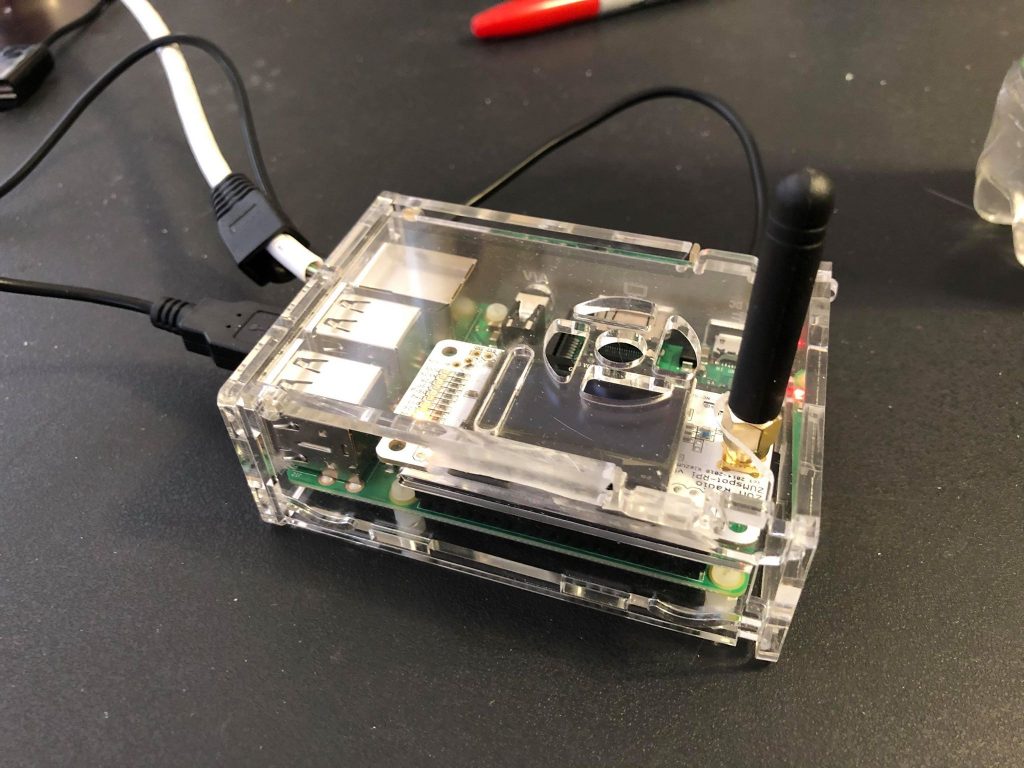
For hardware, the decisions were easy. I chose a Pi3B+ because I had one on hand, I wanted extra power and additional USB ports that the Zero didn’t offer. The ZumSpot moved over from the Zero and on to the GPIO slot and the USB dongle was easy to connect up. The case required 2 little mods for the antenna and the ZumSpot, I cover that in the video at the end.
The Franken-Pi Hardware.
The software side of the build is where the real complexity comes in and frankly, it felt clunky overall. I needed to start with one of the two options, Pi-Star or Direwolf as the base, and add the other. I chose the Pi-Star build as the base, not because I thought it was the best option, but I didn’t see an easy way to add that to the Direwolf software. The level of difficulty is high here, because the builds of Pi-Star software for Raspberry Pi (I used Pi-Star Dev Build 4.1.0 as my base) are very very scaled down and a lot of the “basic” pi functionality is removed. I get it, bandwidth costs money and why include something you don’t need, but it made the build more challenging. So while I was able to quickly set up Direwolf on a basic Buster build, the activity of restoring and de-customizing the Pi-Star build to add modules like GPSD required most of the additional work, which I will noted below.
Starting the install process – Hardware and Base Build
Move the ZumSpot from a Pi Zero to a Pi-3B+. I had the spare and I wanted the extra USB ports for the project.
Download the latest beta version from the Pi-Star website: https://www.pistar.uk/downloads/ I used the January 20, 2020 Beta which is based on the Buster version of Raspberry Pi software.
Do the voodoo you need to do to put the .img file on a MicroSD card. Plenty of tutorials online for that so I won’t go into it.
Boot the card to the Pi and discover the IP address. I am a command line guy, so I SSH’d into the Pi and did the following:
Change from the default password of “raspberry” by using the passwd command
Add IPv6 to the Pi-Star: open /etc/modules for editing: sudo nano /etc/modules and add ipv6 to the end. But I don’t use IPv6 you say. It’s a dependency for using the GPSD module that get’s installed in the next few steps.
Reboot
Next – Install the Direwolf tracker software
I used the Direwolf Git Hub Docs, specifically the Raspberry Pi APRS Tracker document to guide me.
Step 1: Get the system code for GPS installed.
sudo apt-get install gpsd If you get any errors, go back and make sure you did the IPv6 step above.
sudo apt-get install gpsd-clients python-gps
sudo apt-get install libgps-dev
Step 2: Setting up the GPS software I love the little GPS dongles from Adafruit and others and I regularly used them on Stratum 1 Clocks that I build, but I chose a USB version for two reasons. 1) Hard to get at the GPIO pins with the Zum Spot Hat using it, and 2) I wanted something a little more hardened for the car. So, assuming you go my way:
cat /dev/ttyACM0 will show you if the GPS is sending data into the system
Reboot
cgps -s should show you the position data from your GPS. Don’t worry if this takes 15-20 minutes the first time. It needs to download some software from the satellites first.
The Direwolf documentation says to do some testing with the GPSD daemon here. I didn’t find the need to do that. Your mileage may vary.
Here’s another one of those changes you need to make because of the way Pi-Star is setup. Part of the disk is mounted as read only, so if you try to make changes to the GPSD config file without this step, you get errors. sudo mount -o remount,rw /
Now, edit the GPSD config file so it has at least this info (some may already exist) sudo nano /etc/default/gpsd
Exit and then type sudo systemctl restart gpsd to update the system with the changed config.
While we have the system set to Read/Write, we need to re-enable the on-board sound card which is disabled in the Pi-Star Beta build. Enter sudo nano /boot/config.txt. Scroll down to the section # Enable audio and un-comment the line dtparam=audio=on by removing the #. It should look like this when you are done. Exit and save the file and reboot.
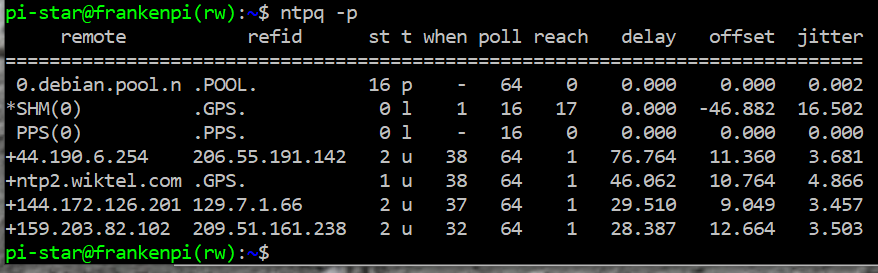
Step 3: (Optional!) Getting GPS time I like having the onboard NTP process being fed from the GPS since the satellites have super accurate time. This configuration is similar to the lines from from the Direwolf Documentation, but I have found that the SatSignal.eu recommendations for ntp.conf have served me well. My GPS device does not feed PPS signals, but I left it in should someone need it.
Edit ntp.conf with sudo nano /etc/ntp.conf Add the following lines near the list of servers
server 127.127.22.0 minpoll 4 maxpoll 4 fudge 127.127.22.0 refid PPS
Let’s tell the NTP server to restart and pick up the new config file: sudo /etc/init.d/ntp restart
Now, give it a minute or so and check ntpq -p and you will see something like this:
I stopped and made a backup of my MicroSD card here. Not a required step, but if I break something in the next few steps, I don’t want to go all the way back to start.
Step 4: Now we actually get to install Direwolf! So the Raspberry PI APRS Tracker instructions we have been following for Direwolf assume you already have the core software installed. We don’t. So let’s hop over to the Direwolf Doc files again and chose the Raspberry Pi APRS instructions. Or just enter the code below if you trust me and don’t need the docs.
We’re picking up in that document at Step 2 in the docs because we’ve completed some of the pre-work. (August 2017 version, page 11) Let’s get some more dependencies! sudo apt-get install libasound2-dev libudev-dev
Finally we get to download the actual program! cd ~ (this puts you back in your home directory) git clone https://www.github.com/wb2osz/direwolf cd direwolf
OK, we’re done with those instructions and back to step 5 of the Tracker document. Let’s build the software:
make clean
make This will take a few minutes. Make sure it ends clean. If you see an error for GPSD go back!
sudo make install You don’t need to run make install-conf when this is done as the prompt says, we’ll take care of that next. If you did, don’t worry, it doesn’t hurt anything.
All of the customization for Direwolf comes in the config file, so we’ll make one. Major credit to WB2OSZ for his extremely well documented configs. They have always made things super easy for me. However, there are many many items we don’t need for this, so I reduced it to the basics. cd .. nano direwolf.conf (you don’t need sudo in your home directory) and enter the code below.
So let’s breakdown what all that means because you will need to make some changes for your situation
#N4BFR Modified - Minimal Config File This is a comment since it starts with #
ADEVICE and ACHANNELS This is a placebo command that points to a fake audio device, it goes back to the fact that Direwolf has its roots as a digipeater. If you were going to also send packets to RF this would be important, but not in this application. So don’t change this.
MYCALL UR1CALL-## This is where you tell the APRS system the call sign or name of your tracker and SSID. Replace UR1CALL with the ham radio call sign you will use and -## with your SSID. Info on choosing an SSID number is here.
GPSD this tells Direwolf to get position data from GPSD
TBEACON EVERY=4 symbol="car" comment="My Tracker" SENDTO=IG This is a key line. TBEACON tells Direwolf to use it’s tracker functionality to send a beacon containing the GPS Location. EVERY=4 sets the interval to beacon in minutes. The symbol=”car” sets your icon on the APRS maps. The comment field can say what you want. Then SENDTO=IG tells it to send the packet to the Internet Gateway (IG). There are other options for this packet, but these are the ones I chose. Check the Direwolf documentation around TBEACON and PBEACON for more info.
SMARTBEACONING ... this is how you can adjust the frequency of how often a beacon is sent to the gateway.
MODEM 1200 is another legacy code.
IGSERVER... The server set is the one for North America. Set yours locally.
IGLOGIN... you need one. Find out more on the Internet.
IGTXLIMIT... sets the top end of 6 beacons in 10 minutes so you don’t hog the gateway.
When you get it the way you want it, close and save.
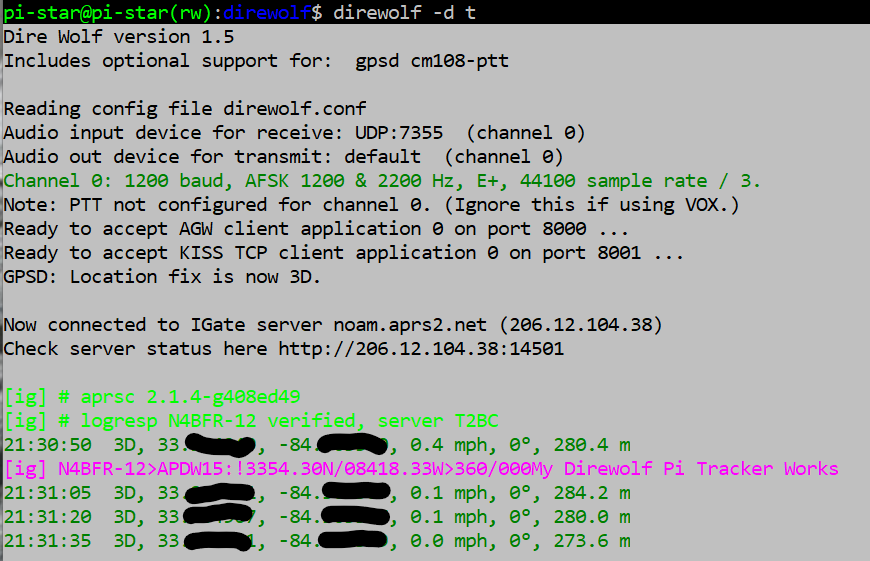
Step 5 – Testing Direwolf You should still be in the Direwolf directory but if not type cd~/direwolf to get there. We’re ready to test with this command direwolf -d t This will start the tracker with position debugging information. If successful, it will look something like this on your pi screen (location obscured).
Pat yourself on the back. Then, shut down the Pi and make a backup. Call your elmer and tell him the good news while you wait for the backup to finish.
Now, what about that Pi-Star thing?
The good news is that with all the functionality I needed to add back in to the Pi so Direwolf could run didn’t seem to clobber anything important for the Pi-Star side. Let’s go through the default set-up method for Pi-Star just to be sure.
Open a web browser and go to the Pi-Star home page. (For me it was http://10.0.1.xx, your network may vary). Because I am using a Pi3 with Ethernet, I just use the same address I was using to SSH into the device. The Base Pi-Star build also sets up it’s own Wifi hotspot. Check the Pi-Star site for more info if needed.
When I opened up the page for the first time it kicked-off a configuration script and then sent me to the configuration page. When prompted for a password it wanted the default password (raspberry), not the one we changed to earlier. You can reset it at the bottom of the Configuration page.
I won’t detail all the Pi-Star configuration steps because there are so many. I will throw in a couple of recommendations:
What frequency to use? I have picked from the list of Simplex Cross-band frequencies on the Southeastern Repeater Association (list). The big thing here is to avoid interference with repeaters or satellite activity.
Change your host name from the default. Tech people I trust have told me there’s a risk here, so why not change it.
DMR: Most of my friends in the Atlanta area find DMR Master 3002 to function well if you are choosing one in the Southeast US
You will go through a couple of rounds of configuration as you progress through the web tool and it pulls in things like an updated list of ZumSpot style modems.
I used the tool to reset the password for the admin page to the same one I was using for SSH for consistency.
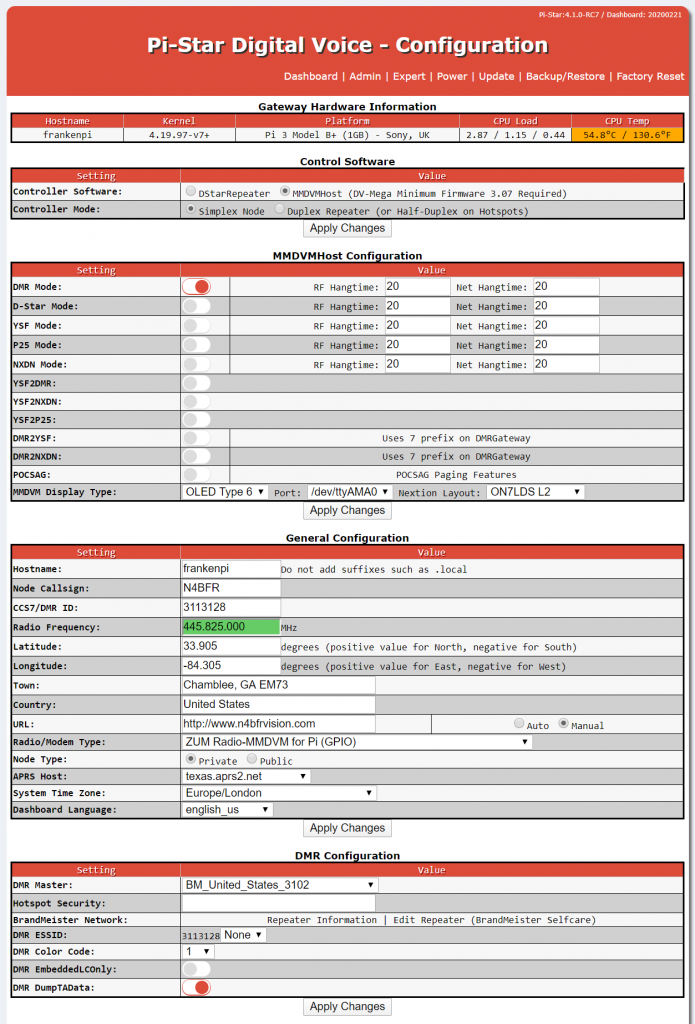
The setup seemed to go normally. Here’s a view of part of my configuration page.
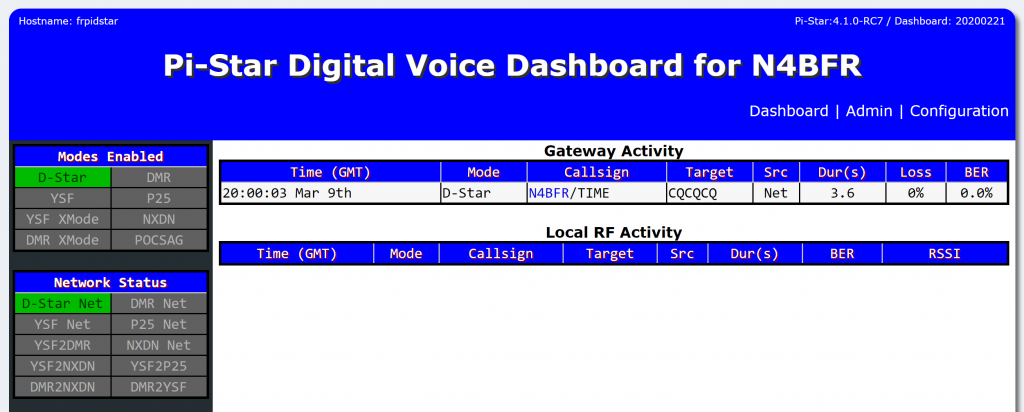
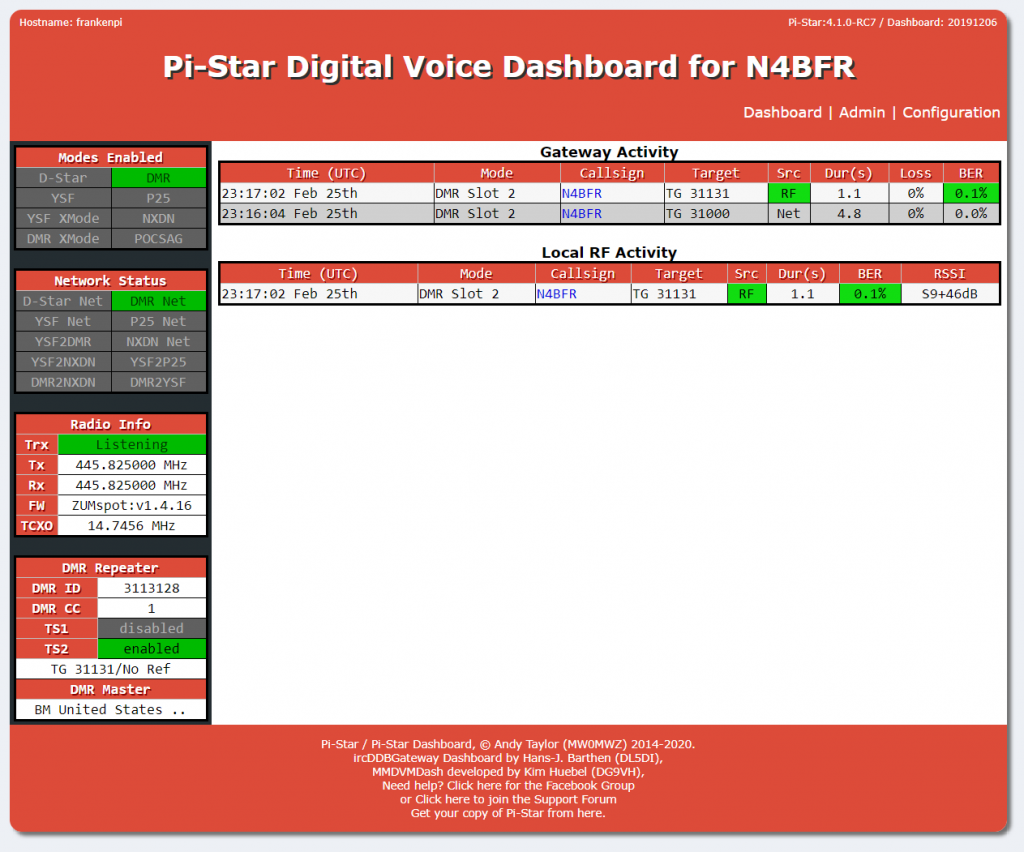
And here’ a view of the dashboard:
One last set-up item, Start the Tracker on Boot
In section 6 of the current Direwolf Documentation for the Raspberry Pi, (Currently Raspberry-Pi-APRS.pdf) there are instructions on how to enable automatic startup. WB2OSZ includes a nice script, dw-start.sh that can be modified to handle this. Here’s how I do it.
While in the direwolf directory, we’ll copy the stock start-up script to the mail home directory (/home/pi-star) with the command cp dw-start.sh ~/ This will keep a copy of the original file in case you want it in the future.
Change back into your home directory with cd ~ and then open the file for editing with nano dw-start.sh. Here’s are the changes I made:
RUNMODE=CLI This was auto, but since I know I will only be using this as a client, I set this to be the default.
DIREWOLF="direwolf" I didn’t need to change this.
Start up command: I chose #1 because we are not running with an SDR attached, so DWCMD="$DIREWOLF" Because we’re not really running an audio channel, I didn’t see the need to print audio stats so I removed that option.
You shouldn’t need to change anything below this. Save the file and close the editor.
Test it out with the command ./dw-start.sh. You should see this after about 30 seconds:
Your Direwolf APRS Tracker is now running in the background. To see the program in action use the command: screen -D -r "direwolf"
You can watch this as long as you like, but if you would like to return it to running in the background type Ctrl-a and then the letter “d” to put it back in the background. I found more on the Screen command on the RasPi.TV site.
Last step before the finish line. We have a script, it works and not only will it start the Tracker, it will monitor it and restart it as needed. All we need to do is tell the Pi to run the script. I am using the the crontab program that handles scheduling for things like this on the Pi. In your home directory type crontab -e. If this is the first time you have run crontab on this machine you will be prompted to choose an editor. I use nano, but use what you like.
Scroll down to a blank line and type this: * * * * * /home/pi-star/dw-start.sh >/dev/null 2>&1 This will run once per minute to check that your Tracker is running. If it isn’t the script will restart it. If you’re following along with the instructions on the Direwolf site note the path you want to use in this case is /home/pi-star/ vs /home/pi/ because of the way pi-star is setup. When successful it should say crontab: installing new crontab with no other messages.
Congratulations!
You are finished! Before you go set this up in the truck or wherever else you might want to put it, shutdown your Pi and make a backup of the SD card. Now if you want to experiment more, you can always roll back to a good working version.
I’m not going to get into how to connect it in your mobile unit since there are too many variables. I am currently powering it with an Anker power bank and using my phone’s Wifi hotspot. If you want a look at the finished product, watch my YouTube video below.
From my N4BFR Vision YouTube Channel
Expected Questions
I’m avoiding calling this “Frequently Asked Questions” but it could become that later. Some things I thought of that you may be wondering about.
Q: Are you going to publish an IMG file? A: I don’t plan to. I am making this for a specific use, and I don’t expect to have time to track updates against multiple authors in the future.
Q: You said you were going to use this for D-Star but it’s configured for DMR in your sample, is that right? A: Yes, this was just a quicker way to check configuration because I have a known-good Pi-Star with DMR already set up.
Q: Should I run “Update” on this? A: I made sure I started with the most recent beta of PiStar and the latest version of Direwolf. I did run sudo apt-get update prior to any installation, and I ran the update function in the Pi-Star dashboard without issue. Backup first and see what happens, but I generally recommend keeping things updated regularly.
Q: Would this work on a different Pi? (Zero, 4, etc) A: Probably. Give it a try!
Q: Can I modify this by doing….? A: Go crazy! This is just one idea. I hope it inspires someone. The CPU load is very low, less than 2% even when on DMR, so there are resources available.
Q: How big of a SD card did you use? A: 16 GB. I prefer 8 GB but they are harder to come by and right now 16 seems to be the sweet spot of price and availability.
Q: Can you integrate administration into the Pi-Star Expert Configuration section? A: I was able to use the SSH tool to make basic changes to the config file and kick off the program during my testing. I’m not planning on any other integration at this time.
Q: How do I contact you because I have a problem with… A: I can’t give any support for this, but there are great tools like Google and Bing that you can put the error into and probably figure out an answer.
Q: How can I email you and share a success story or a fun anecdote? A: Best way to reach me is use my call sign @arrl.net or one of the links at the bottom of the page.
ULA Atlas 5 with Solar Orbiter – February 2020 by N4BFR
I really enjoyed going to a night launch on the Space Coast on Feb. 9. United Launch Alliance shot a Solar Orbiter for ESA that will map close to the solar poles for the first time. Cool science is coming!
I used this an an experiment to photograph a bunch of different ways. 4 cameras ended up in this final video. My Sony A58 shot the launch in HD, I used my Panasonic Lumix to shoot the rocket gliding under the moon, I used a small “Action Cam” to get a time lapse of the launch, and finally my iPhone shot the selfie videos.
One shot that didn’t make it was a 4K Vertical Launch shot. I started the camera with about 2 minutes to go, but when I adjusted its placement I bumped it. No recording. Good thing I had some redundancy!
From the Radio Side, I listened to the launch on the K4GCC 146.94 repeater, who simulcast the launch audio for every launch via a phone patch. (Well it was a phone patch the two times I heard it). I also attempted to listen to the CCAFS traffic via a scanner. I was able to hear some KSC gate discussions, but no operational audio related to the launch. Something to try for next time!
I’ve been enjoying getting back into Parks on the Air over the last few months. I have about 25 confirmed chases and 2 activations. I shot a video of my Banks Lake activation, where I made about 30 contacts on Christmas Day. Enjoy.
If you like the video, please subscribe to my YouTube channel.